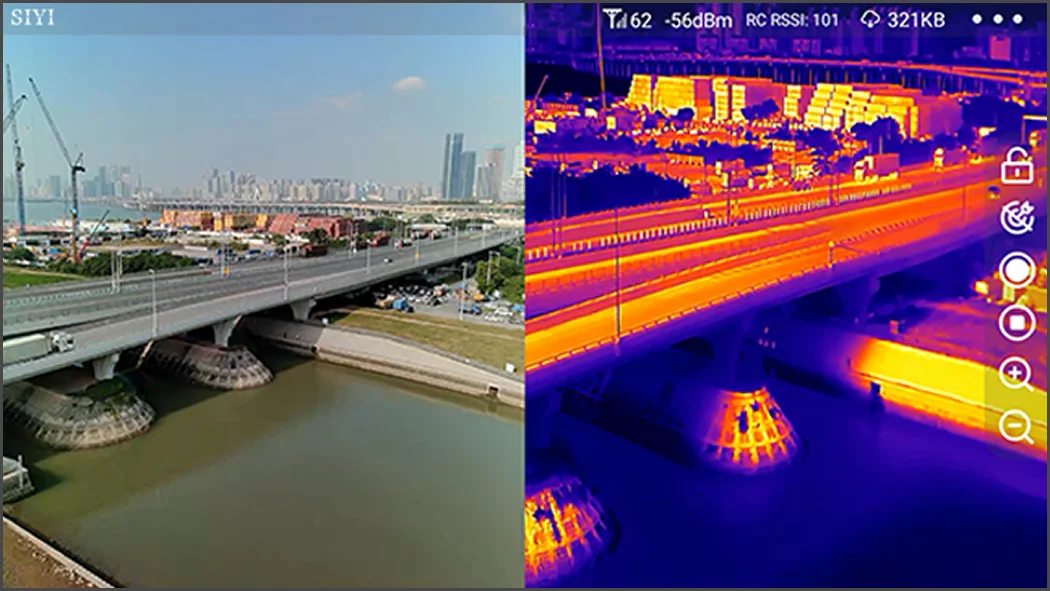


全局测温

640*512高分
热成像测温
热成像测温

4K超高清录像
与拍照
与拍照

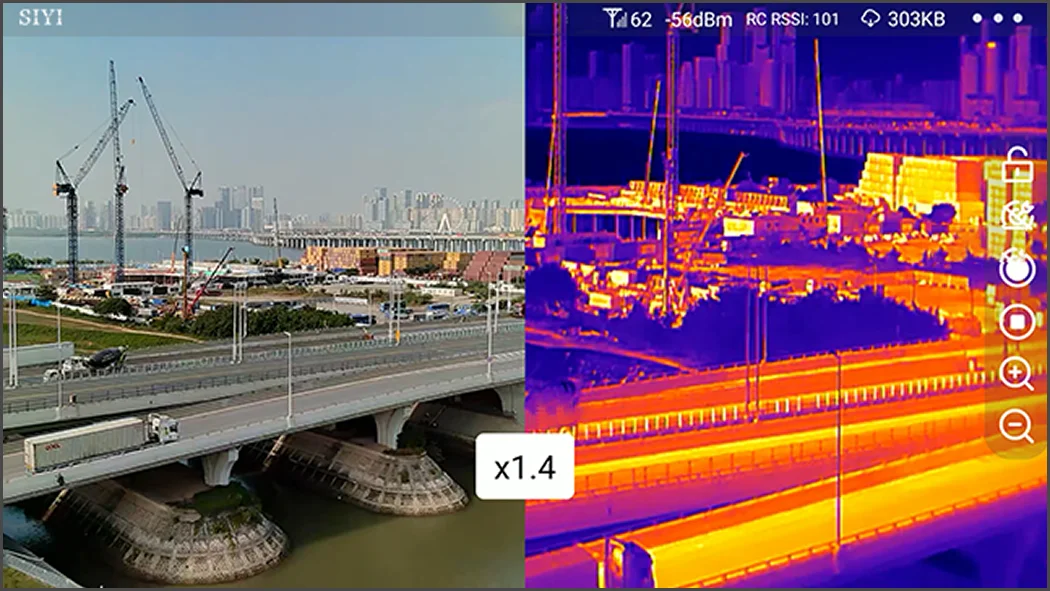
拼接画面 / 联动变倍

航向轴540°旋转范围

机头模式

倒立模式

兼容Ardupilot & PX4
(Mavlink)
(Mavlink)

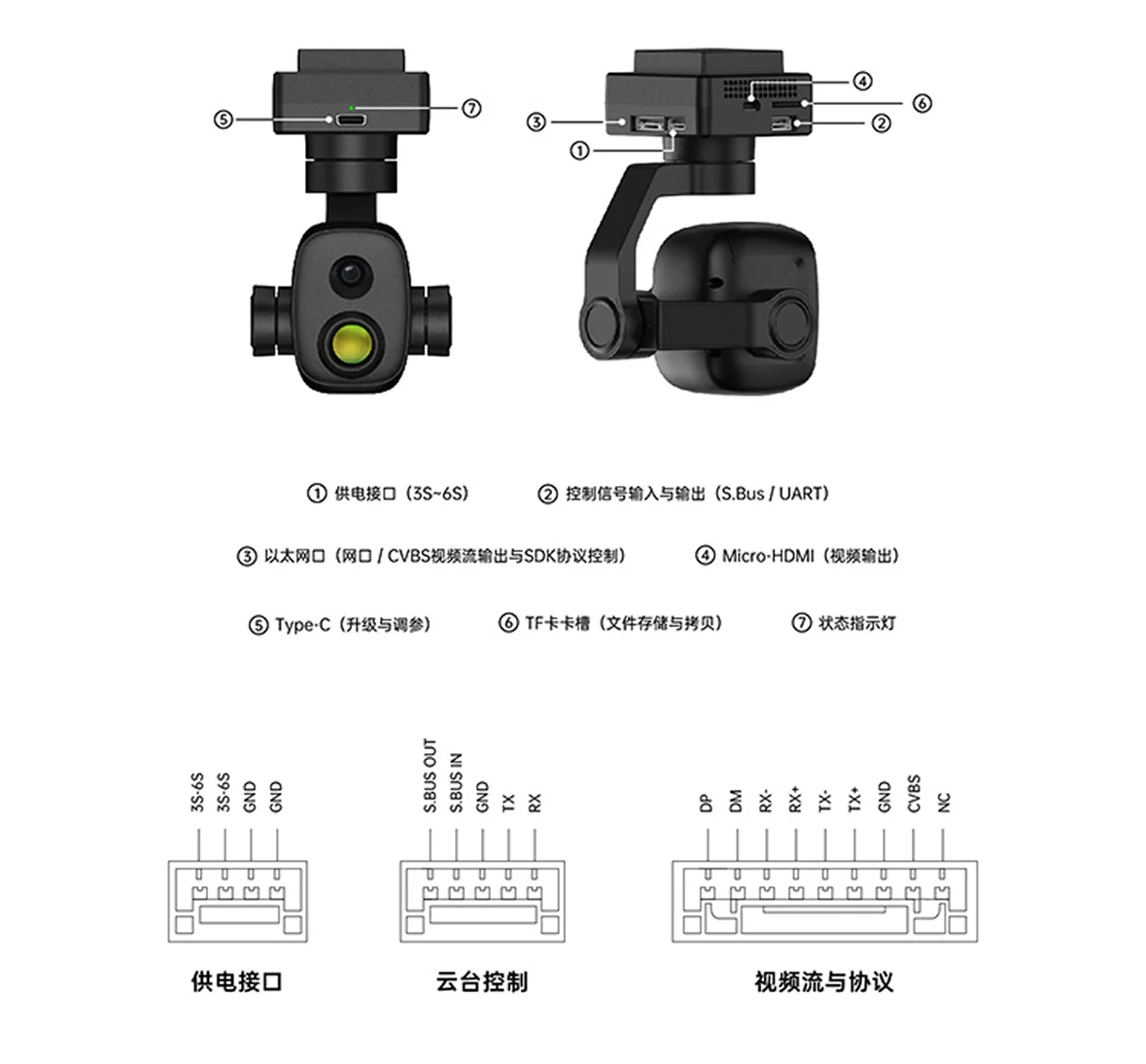
网口,HDMI,
CVBS视频输出
CVBS视频输出

高精度、高协同
控制算法
控制算法

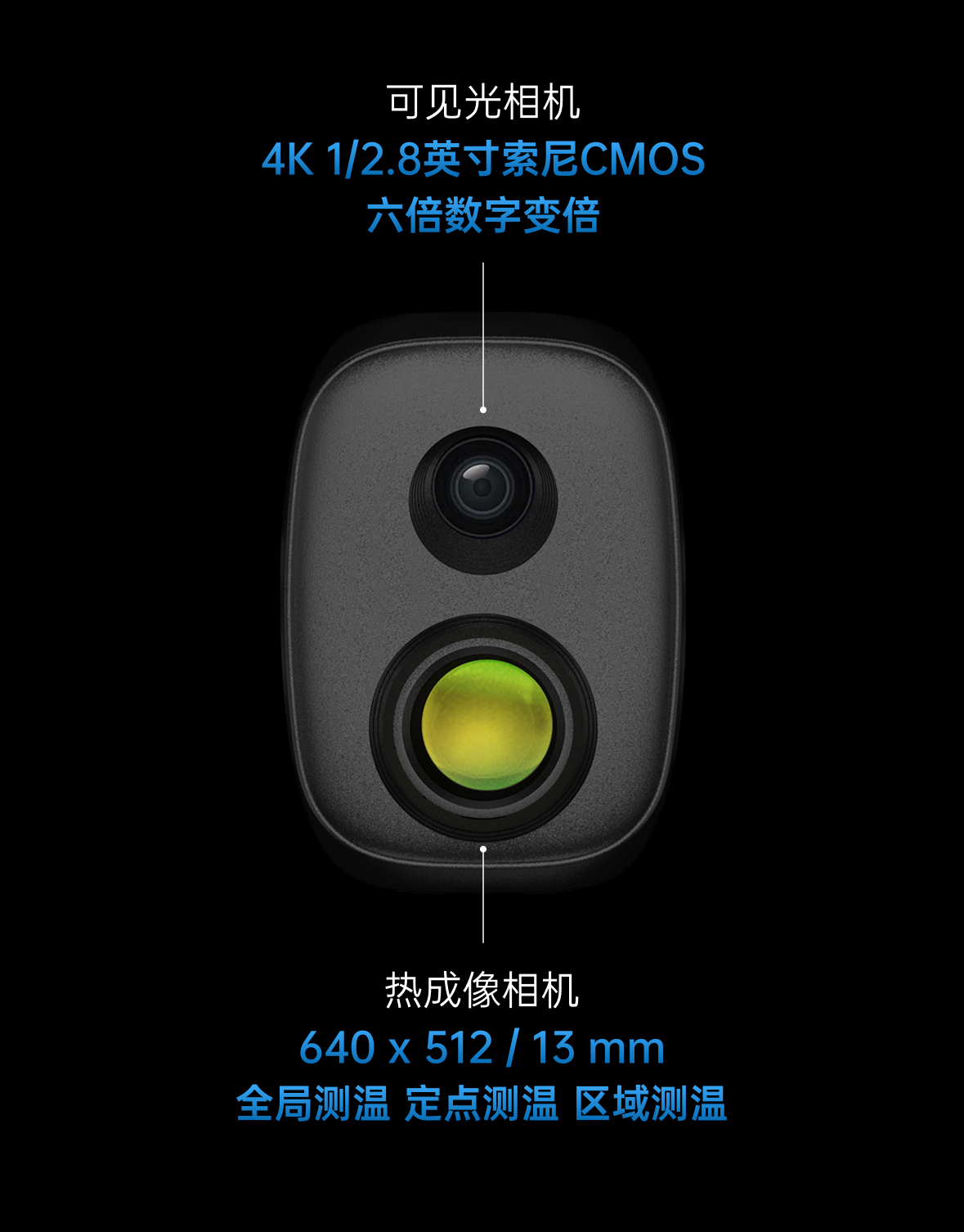
双传感器 迷你轻量
ZT6是一款集成了可见光传感器与热成像传感器的迷你轻量化光电吊舱,双传感器高效协同,
赋予无人机清晰开阔视野的同时,也可以检测热
赋予无人机清晰开阔视野的同时,也可以检测热
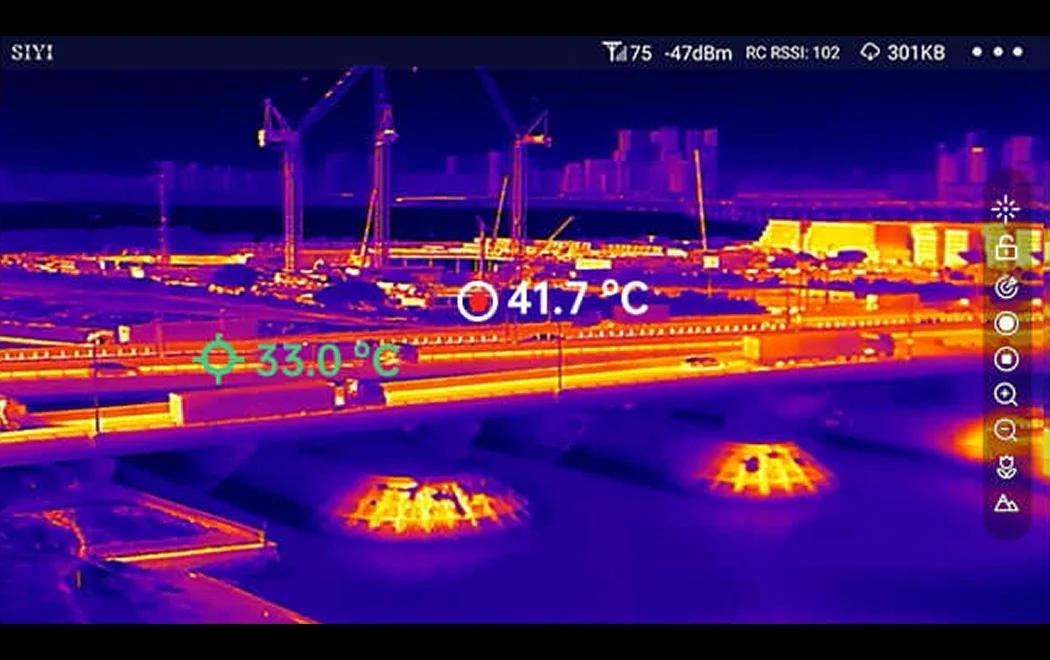
高分辨率热成像
ZT6 迷你双光吊舱搭载 640*512 级别高分辨率热成像传感器,辅以 13mm 焦距和 30fps 图像帧速率,视野开阔、图像清晰,可及时发现异常热源进行可视化非接触测温,反应快速准确
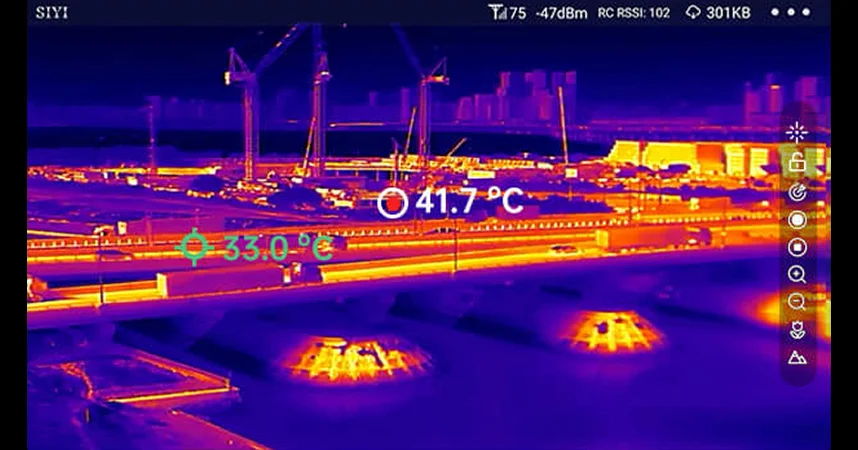
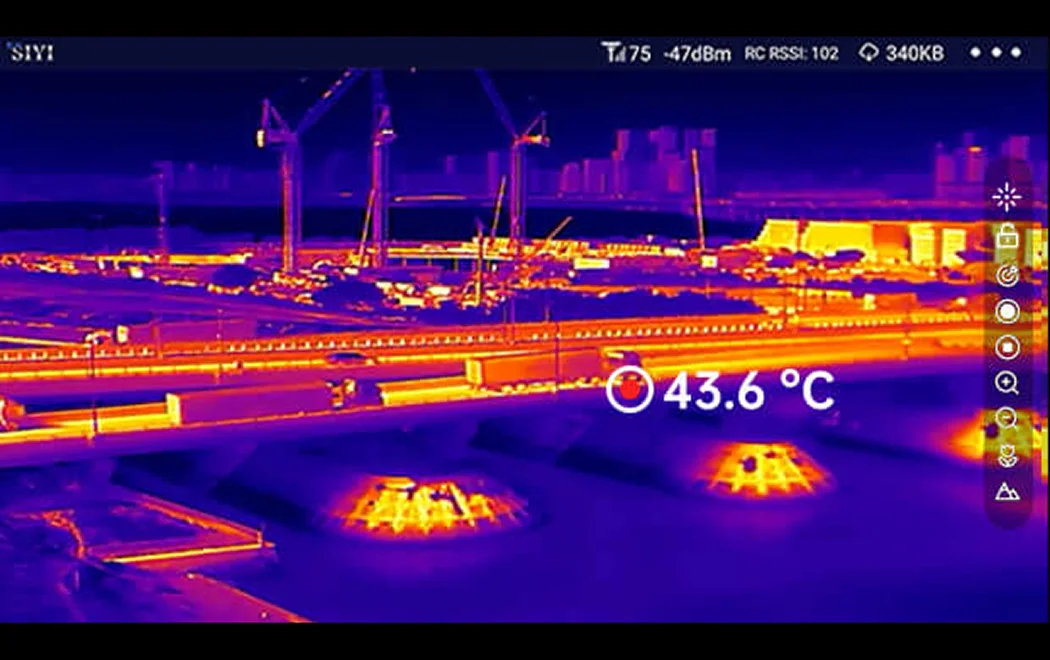
全局测温

区域测温
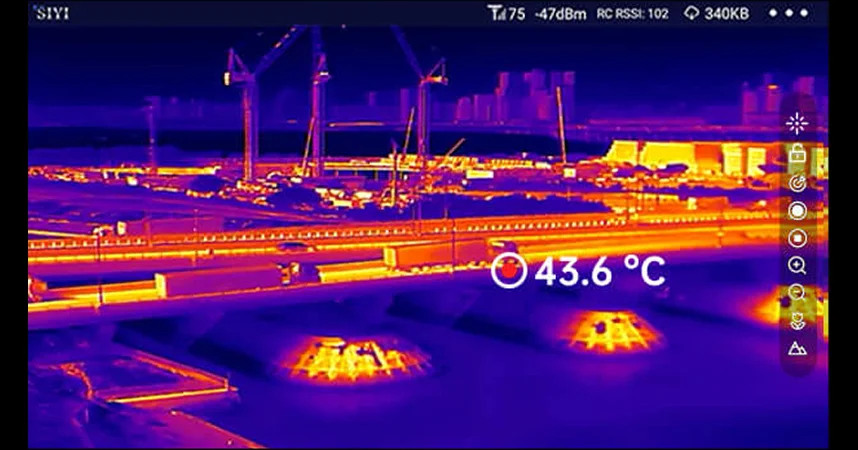
定点测温

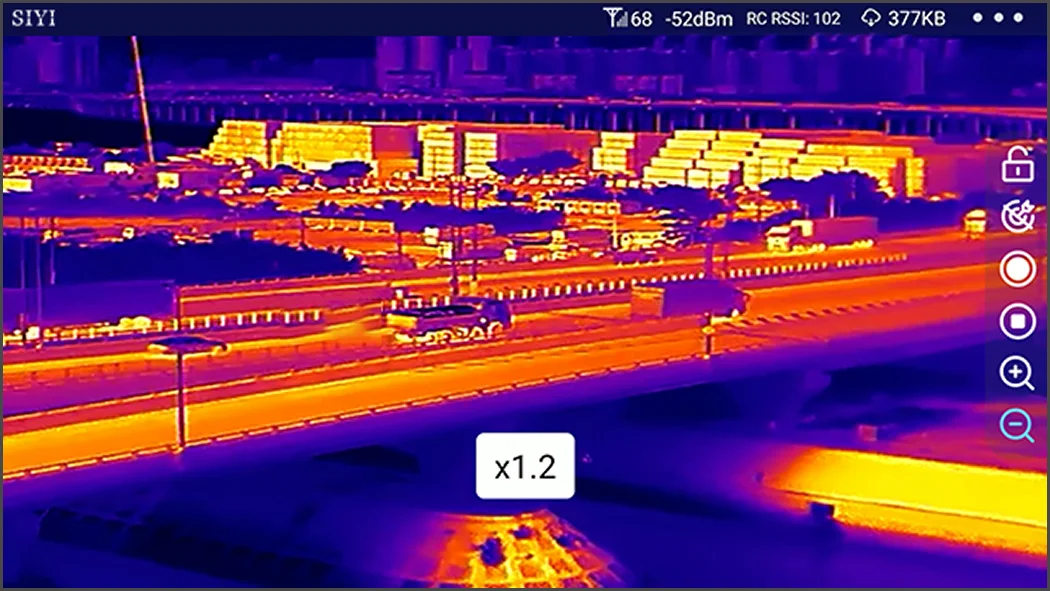
红外变焦
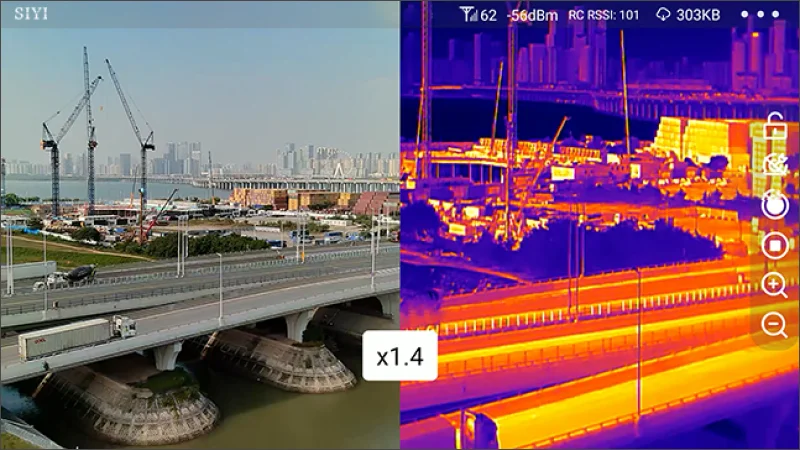
双光联动变焦

视频拼接
云台工作模式
云台与水平面成90度夹角安装时将自动进入机 头模式,方便安装在垂起固定翼无人机的机头 位置以实现更友好的安装角度与更广阔的视野。

在水平方向,云台自动
跟随飞行器方向同步转动

云台随飞行器翻滚的方向同步
转动,获得第一人称飞行视角,
输出增强稳定的画面效果。

在水平方向,当飞行器转动时,云
台不会跟随飞行器自动转动
高精度高协同控制算法
思翼科技的云台控制增稳算法日臻化境
IMU校准算法
对惯性测量单元的误差进行补偿和修正,降低零偏、
尺度因子、轴间误差、温度漂移、噪声等干扰因素,
极大提升IMU测量精度,提升云台在大温差、大幅度机
动、强震动环境下的稳定性。
尺度因子、轴间误差、温度漂移、噪声等干扰因素,
极大提升IMU测量精度,提升云台在大温差、大幅度机
动、强震动环境下的稳定性。
姿态融合算法
综合利用加速度计、陀螺仪等传感器的数据,通过
数学模型和滤波算法,得到云台俯仰角、横滚角和
偏航角并融合这些信息以有效提高系统性能、稳定性和鲁
棒性。
数学模型和滤波算法,得到云台俯仰角、横滚角和
偏航角并融合这些信息以有效提高系统性能、稳定性和鲁
棒性。
工业级三轴增稳控制算法
深度整合利用三轴陀螺仪、三轴加速度传感器、PID控制器、
电机和磁编码器,实现云台姿态稳定控制,在运动中依然
持续输出稳定高清的视频图像。
电机和磁编码器,实现云台姿态稳定控制,在运动中依然
持续输出稳定高清的视频图像。
高精度FOC电机技 空制算法
使电机的电流分量分别控制力矩和磁场,从而实现无刷
电机的解耦控制,大幅降低画面抖动
电机的解耦控制,大幅降低画面抖动
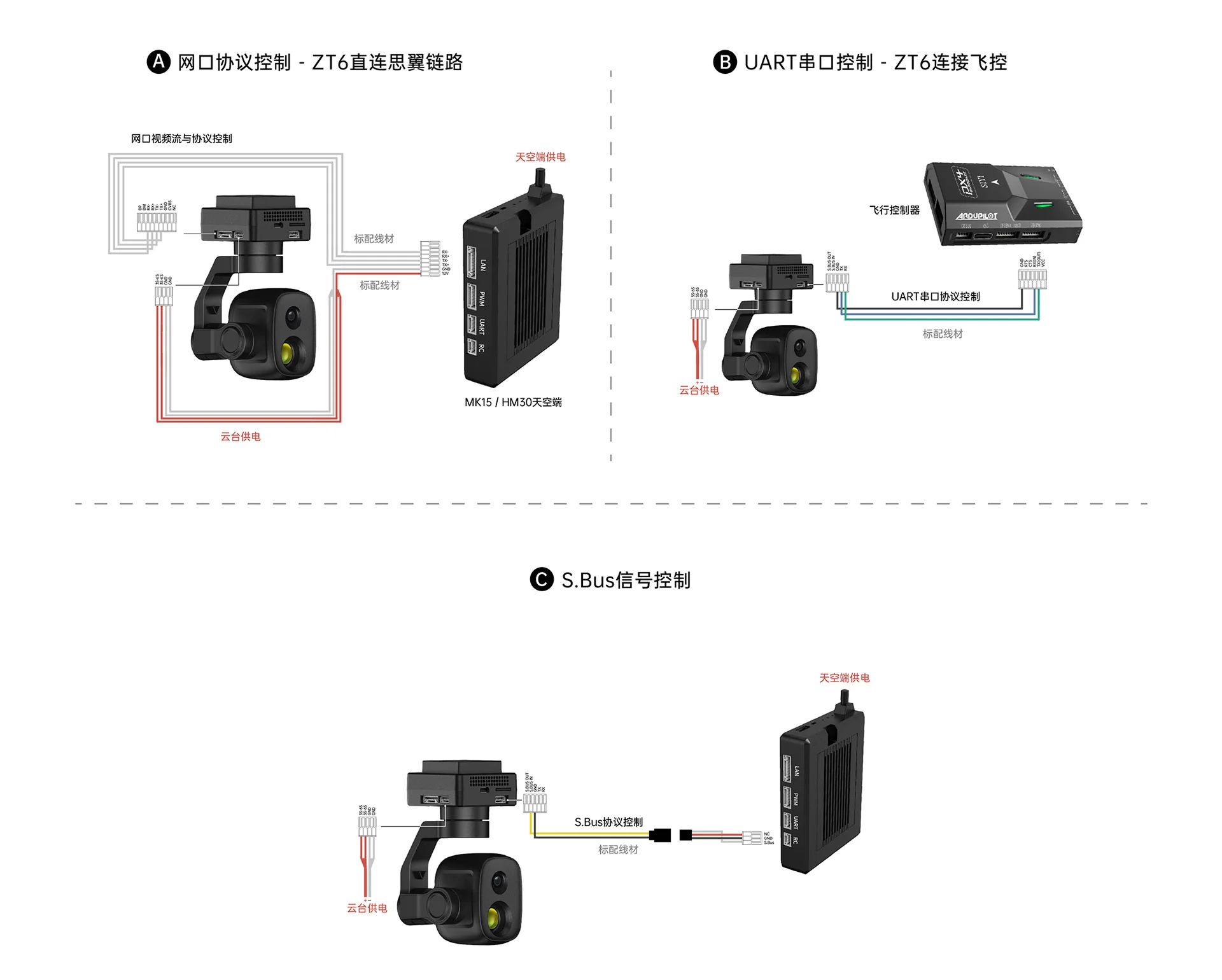
产品接口图
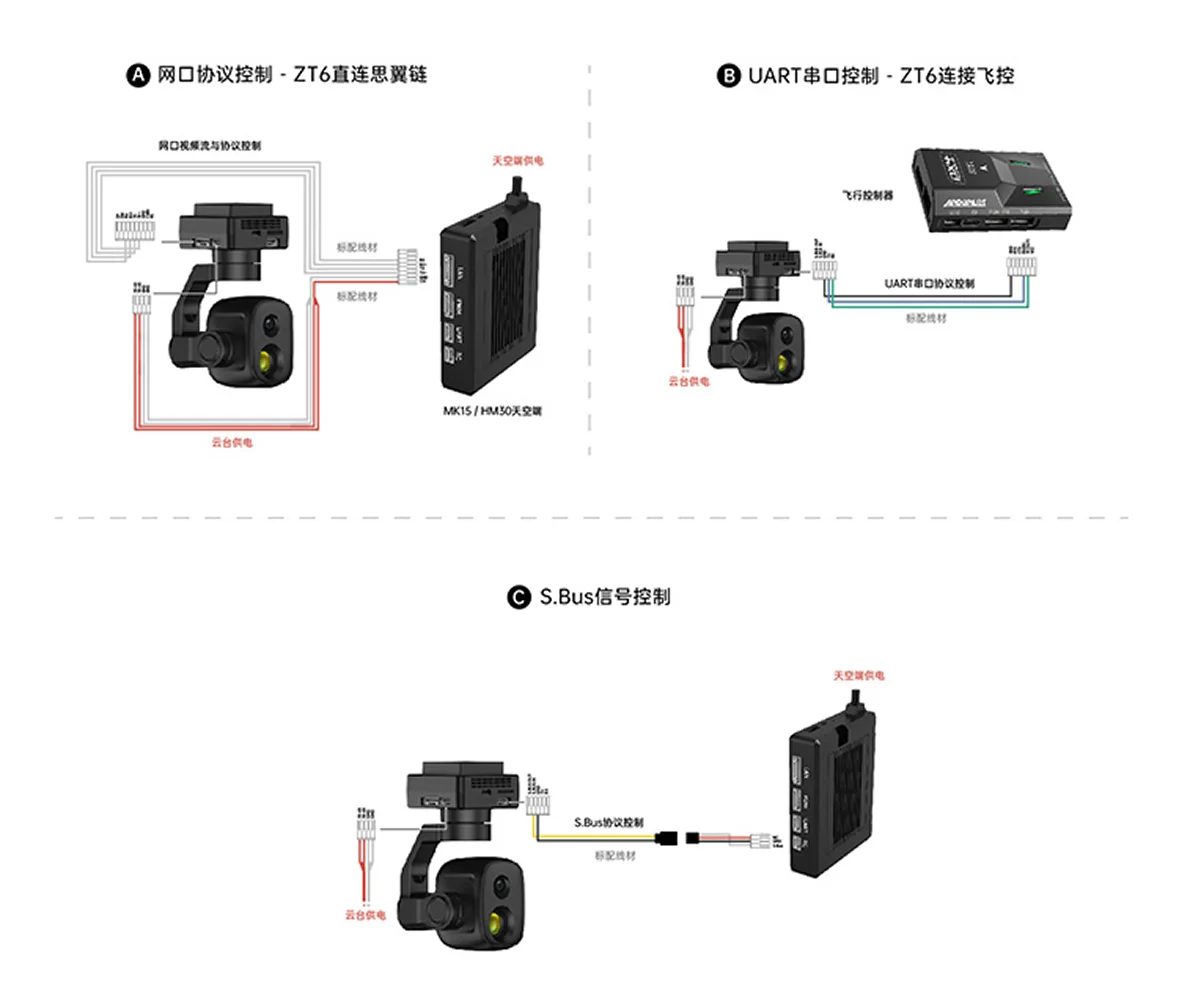
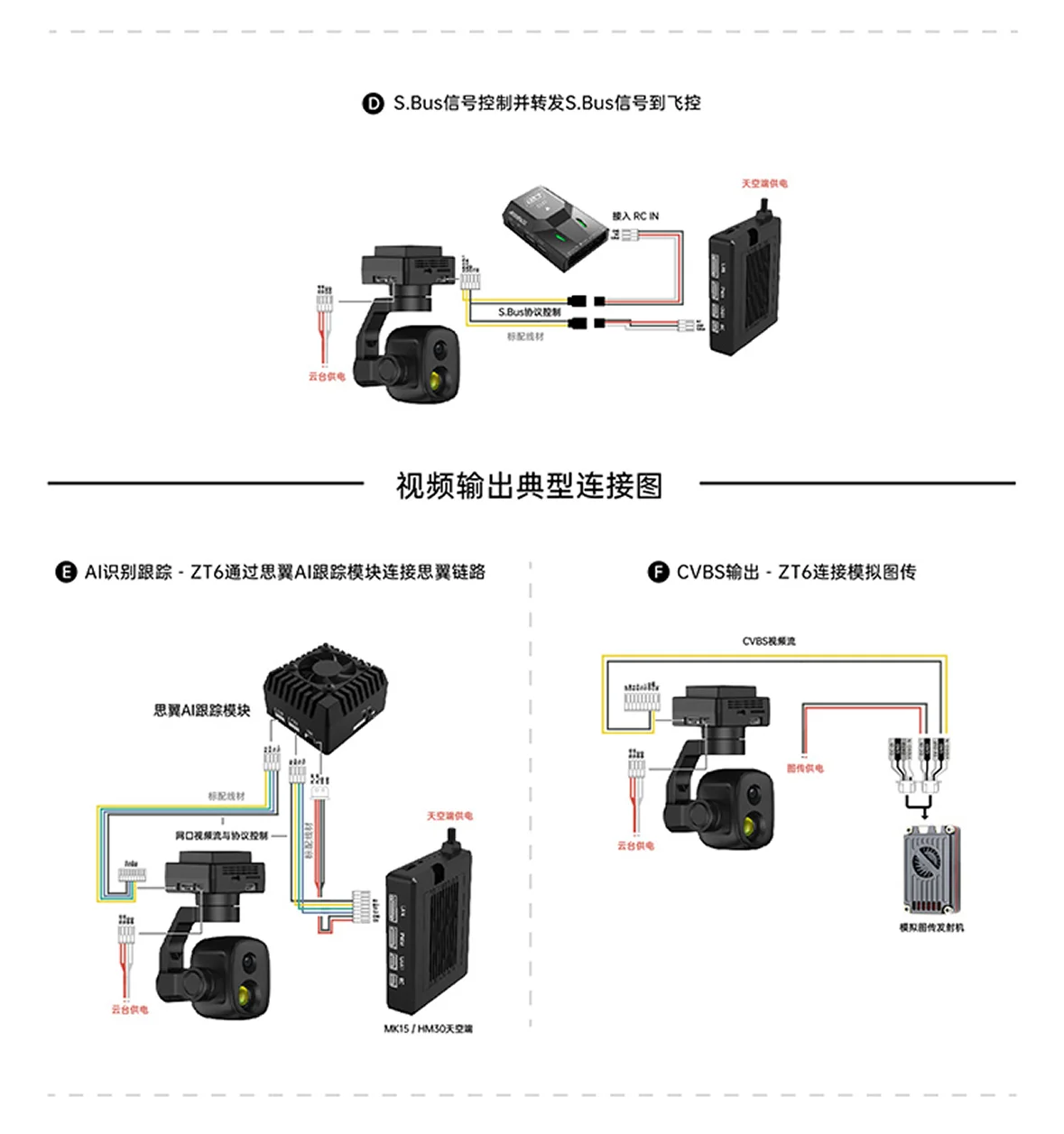
典型连接图
巡台相机控制典型连接图