Excellent UAV Imaging System30X Hybrid Zoom, 10X Optical Zoom
Steady Frame Control, Clear Moment Insight
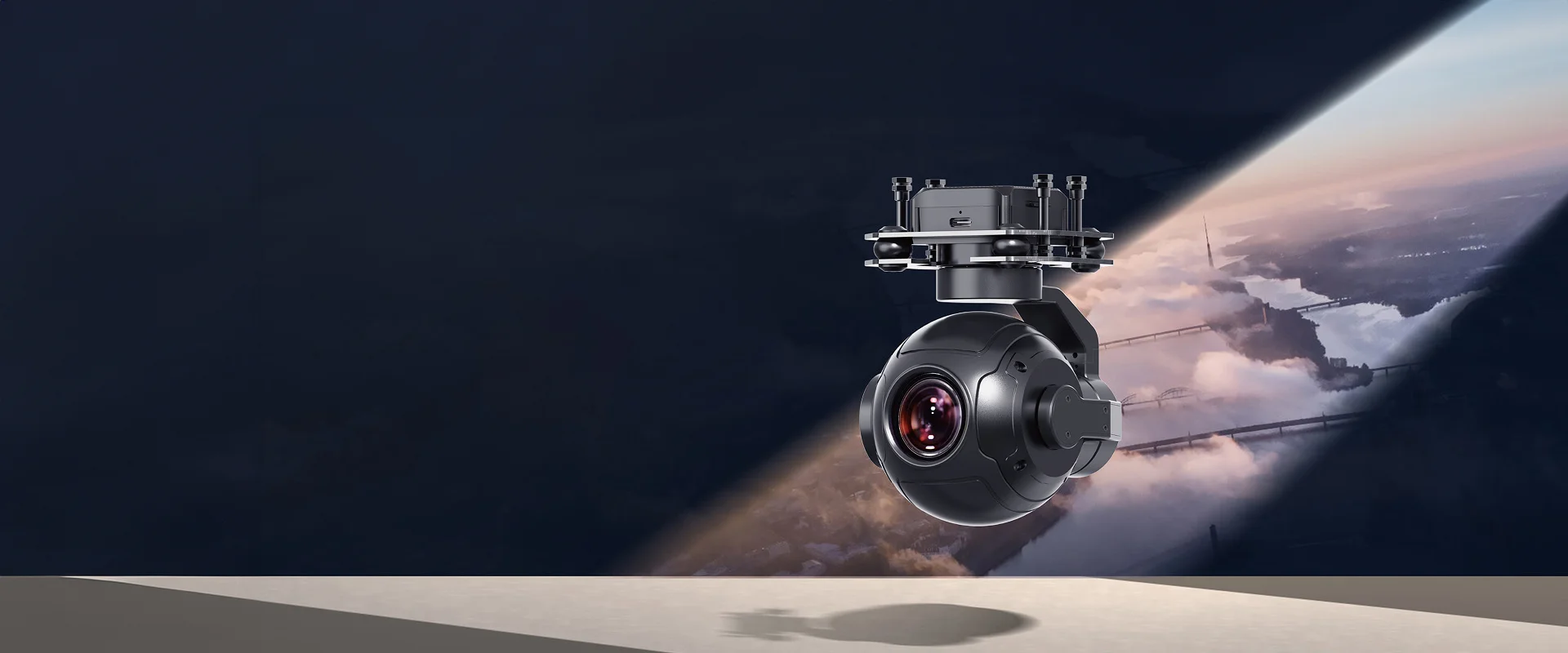
ZR10 Optical Pod
Intelligent Zoom & Starlight Sensor & AI Recognition & Tracking

30X Hybrid Zoom
10X Optical Zoom
10X Optical Zoom

2K Quad HD Video & Photography

4MP / 1/2.7–Inch CMOS

320–Degree Yaw Axis Rotation

Node Mode

Upside Down Mode

Compatible with ArduPilot & PX4 (Mavlink)

High Accuracy & High Collaboration Control Algorithm
Excellent UAV Imaging System
*The picture files captured by ZR10 can be written with GPS location information and time attributes.30X Hybrid Zoom, 10X Optical Zoom
30X Hybrid Zoom, 10X Optical Zoom
ZR10 carries an 1/2.7-inch image sensor, a 4 megapixels CMOS with remarkable photosensitivity ability, excellent 2K video recording and photography.
Up to 30x hybrid zoom (10x optical zoom). The scenery is clear, the algorithm is fast and accurate, and the viewpoint is automatically focused, making it easy to
produce grand pictures. Silky movement, smooth zoom, distant scenery, now within reach.

Point To Focus

Focus Tracking

Starlight Night Vision

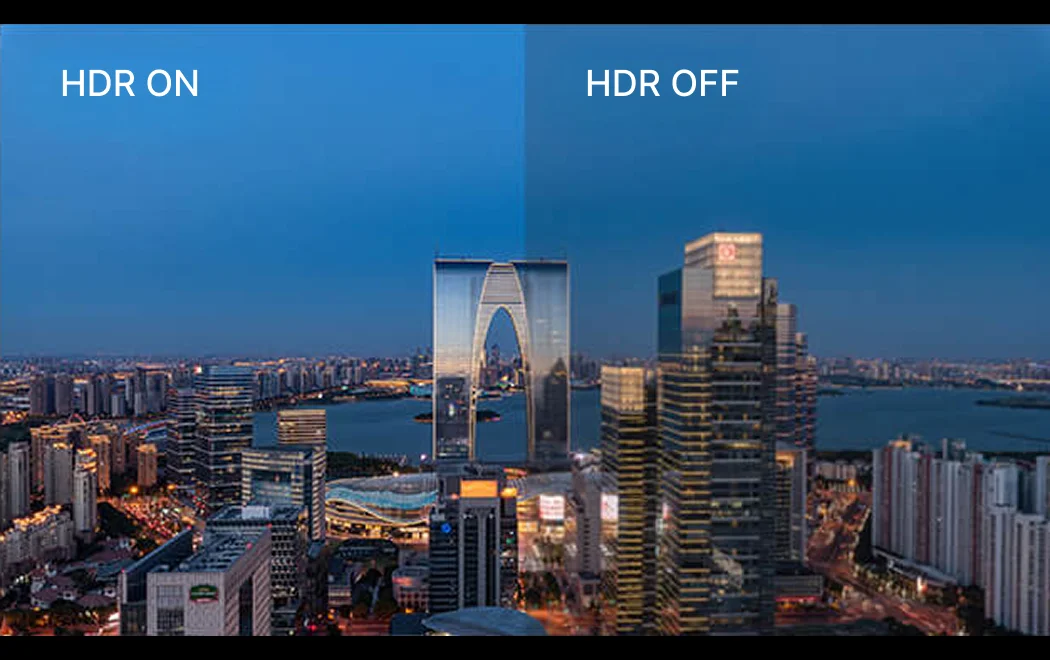
HDR
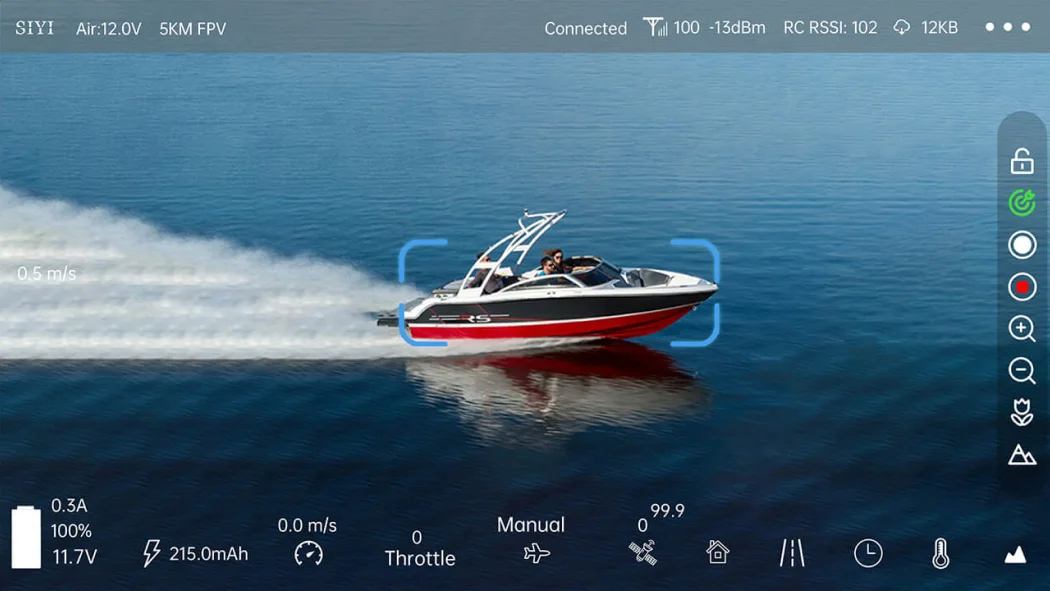
AI Enhanced Smart Identify and Tracking
ZR10 works with the optional SIYI AI tracking module, which combines SIYI's self-developed AI algorithm and collaborate with SIYI optical pods (gimbal cameras)
to achieve real-time tracking and capture of targets, and real-time focusing and zooming to highlight the selected object in the picture.
The target will always be in the center of the picture and maintain a clearly visible proportion of the picture. It supports the anti-lost function. During the following process, if the target is blocked or
briefly leaves the monitoring screen, the AI tracking module can automatically recognize and continue tracking when it re-enters the monitoring screen.
to achieve real-time tracking and capture of targets, and real-time focusing and zooming to highlight the selected object in the picture.
The target will always be in the center of the picture and maintain a clearly visible proportion of the picture. It supports the anti-lost function. During the following process, if the target is blocked or
briefly leaves the monitoring screen, the AI tracking module can automatically recognize and continue tracking when it re-enters the monitoring screen.
Gimbal Motion Mode
Upside Down Mode
Gimbal automatically activates upside down mode
when it is placed upside down, very convenient to be
mounted on multiple kinds of vehicles like UGV, USV,
robot dog, and more robotics.
when it is placed upside down, very convenient to be
mounted on multiple kinds of vehicles like UGV, USV,
robot dog, and more robotics.
Follow Mode
Horizontally, gimbal follows when aircraft rotates.
FPV Mode
Gimbal rotates simultaneously as aircraft rolls to
get FPV view, and output enhanced stable images.
get FPV view, and output enhanced stable images.
Lock Mode
Horizontally, gimbal does not follow when aircraft rotates.
High Accuracy and High Collaboration Control Algorithms
SIYI has done even more in control algorithms and stabilization algorithms
Compensate and correct errors of the inertial measurement unit, reduce interference factors such as zero bias, scale factor, inter-axis error, temperature drift, noise, etc., greatly improve the measurement accuracy of IMU, and improve the stability of the gimbal in large temperature differences, wide margin steering, and strong vibration environments

Product Interface
Typical Connection Diagram