Point To Focus

Unshakable Stability • Master Day & Night
ZR30 Optical Pod
30x optical zoom & Triple Stabilization & Rapid Focus-following

180X Hybrid Zoom
30X Optical Zoom
30X Optical Zoom

4K Ultra HD Video
& Photography
& Photography

8MP
1/2.7-Inch Sony CMOS
1/2.7-Inch Sony CMOS

540-Degree Yaw Axis Rotation
Quick Release
Quick Release

Nose Mode

Upside Down Mode

Compatible with ArduPilot
& PX4 (Mavlink)
& PX4 (Mavlink)

Ethernet
& HDMI Video Output
& HDMI Video Output

High Accuracy & High Collaboration
Control Algorithm
Control Algorithm

Professional UAV Imaging System 180X Hybrid Zoom, 30X Optical Zoom
ZR30 carries an 1/2.7-inch Sony image sensor, an 8 megapixels CMOS with remarkable photosensitivity ability, impressive 4K video recording and photography. Up to
180x hybrid zoom (30x optical zoom). The scenery is clear, the algorithm is fast and accurate, and the viewpoint is automatically focused, making it easy to produce
grand pictures. Silky movement, smooth zoom, distant scenery, now within reach.
*The picture files captured by ZR30 can be written with GPS location information and time attributes
180x hybrid zoom (30x optical zoom). The scenery is clear, the algorithm is fast and accurate, and the viewpoint is automatically focused, making it easy to produce
grand pictures. Silky movement, smooth zoom, distant scenery, now within reach.
*The picture files captured by ZR30 can be written with GPS location information and time attributes

Point To Focus

Focus Tracking

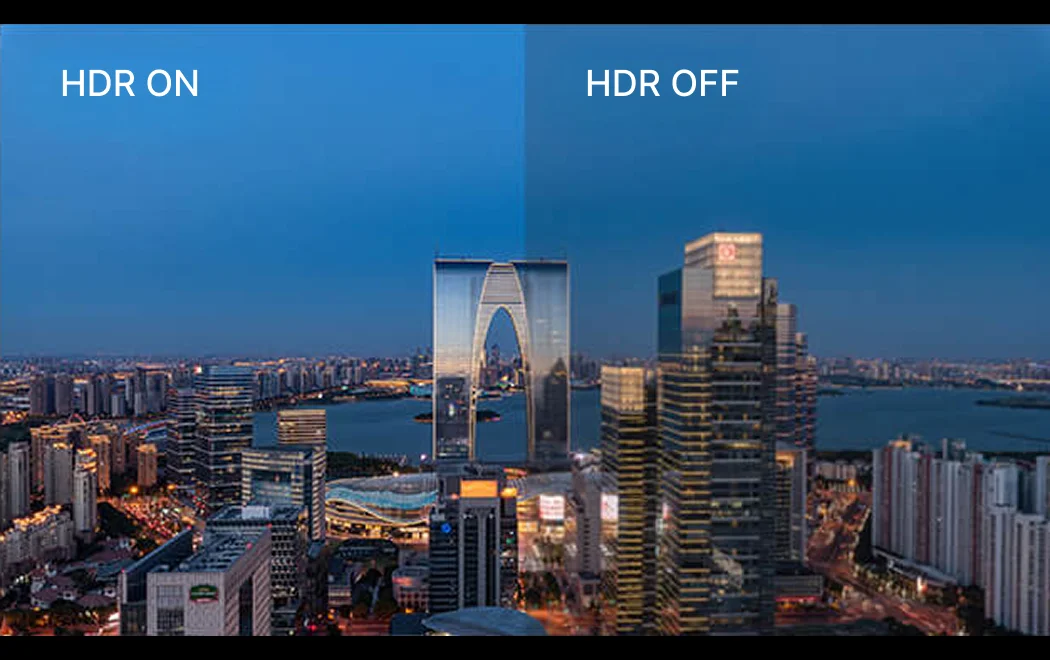
Starlight Night Vision

HDR
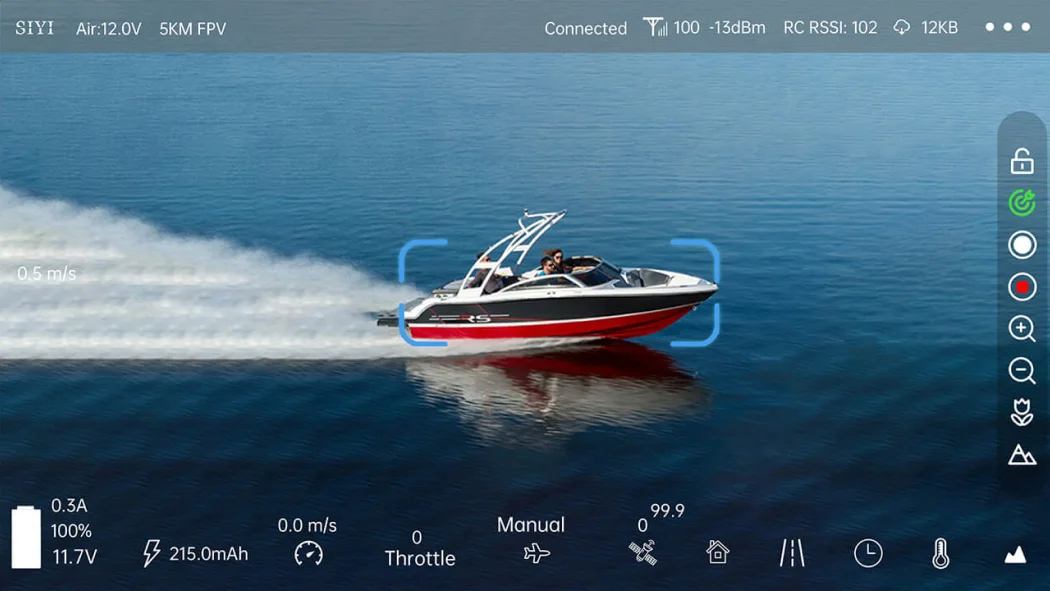
AI Enhanced Smart Identify and Tracking
ZR30 works with the optional SIYI AI tracking module, which combines SIYI's self-developed AI algorithm and collaborate with SIYI optical pods (gimbal cameras)
to achieve real-time tracking and capture of targets, and real-time focusing and zooming to highlight the selected object in the picture. The target will always be in
the center of the picture and maintain a clearly visible proportion of the picture. It supports the anti-lost function. During the following process, if the target is blocked
or briefly leaves the monitoring screen, the AI tracking module can automatically recognize and continue tracking when it re-enters the monitoring screen.
to achieve real-time tracking and capture of targets, and real-time focusing and zooming to highlight the selected object in the picture. The target will always be in
the center of the picture and maintain a clearly visible proportion of the picture. It supports the anti-lost function. During the following process, if the target is blocked
or briefly leaves the monitoring screen, the AI tracking module can automatically recognize and continue tracking when it re-enters the monitoring screen.

540-Degree Yaw Axis Rotation Quick Release, Fast Payload Switch
The yaw axis of ZR30 rotates in a range of 540 degrees. Hanging below VTOL drones or planes, ZR30 optical pod captures 360 degrees around. SIYI quick release
structure will support more SIYI payloads in the future. Stay tuned!
structure will support more SIYI payloads in the future. Stay tuned!
Incomparable Gimbal Control Interface
SIYI optical pods' (gimbal cameras') powerful compatibility contribute to smart robotics ecology in all dimensions.
They can be controlled through traditional S.Bus signal by switches and dials, or through Ethernet by touchscreen or by UDP / TCP commands
based on SIYI gimbal SDK, or through UART by SIYI gimbal SDK or by mainstream open-source protocols ArduPilot and PX4 (Mavlink).
They can be controlled through traditional S.Bus signal by switches and dials, or through Ethernet by touchscreen or by UDP / TCP commands
based on SIYI gimbal SDK, or through UART by SIYI gimbal SDK or by mainstream open-source protocols ArduPilot and PX4 (Mavlink).
Gimbal Motion Mode
When the gimbal is installed at an angle of 90 degrees to the horizontal plane, it will automatically enter the nose mode, which is convenient for installation on the nose position of the fixed-wing drone to achieve a friendlier installation angle and a wider field of view.

Horizontally, gimbal follows when aircraft rotates

Gimbal rotates simultaneously as aircraft rolls
to get FPV view, and output enhanced stable images.

Horizontally, gimbal does not follow
when aircraft rotates.
High Accuracy and High Collaboration Control Algorithms
SIYI has done even more in control algorithms and stabilization algorithms.
IMU Calibration Algorithms
Compensate and correct errors of the inertial measurement unit,
reduce interference factors such as zero bias, scale factor, inter-axis error,
temperature drift, noise, etc., greatly improve the measurement accuracy of IMU,
and improve the stability of the gimbal in large temperature differences,
wide margin steering, and strong vibration environments.
reduce interference factors such as zero bias, scale factor, inter-axis error,
temperature drift, noise, etc., greatly improve the measurement accuracy of IMU,
and improve the stability of the gimbal in large temperature differences,
wide margin steering, and strong vibration environments.
Attitude Fusion Algorithms
Comprehensively utilize the data of sensors such as accelerometers
and gyroscopes, obtain the pitch angle, roll angle, and yaw angle of the
gimbal through mathematical models and filtering algorithms, and fuse this information
to effectively improve system performance, stability, and robustness.
and gyroscopes, obtain the pitch angle, roll angle, and yaw angle of the
gimbal through mathematical models and filtering algorithms, and fuse this information
to effectively improve system performance, stability, and robustness.
Industry-Level 3-Axis Stabilization Algorithms
Deeply integrate and utilize 3-axis gyroscopes, 3-axis accelerometers,
PID controllers, motors, and magnetic encoders to achieve gimbal
attitude stabilization control and continuously output stable high-definition video images during motion.
PID controllers, motors, and magnetic encoders to achieve gimbal
attitude stabilization control and continuously output stable high-definition video images during motion.
High-Precision FOC Motor Control Algorithms
Control the current components of the motor to control torque
and magnetic field respectively, thereby achieving decoupling control of the
brushless motor and greatly reducing picture jitter.
and magnetic field respectively, thereby achieving decoupling control of the
brushless motor and greatly reducing picture jitter.